I’ve got an opportunity to potentially loft a small camera module on a high altitude balloon launch next month. I had written some very simple code for an ESP32-CAM module which can be had for about $7 direct from China, or 2 for $10 from Amazon with Prime. The other day I decided to see how long I could expect the battery to last. I grabbed four fresh Alkalines from the Dollar Tree, and measured the voltage for the 4 pack as 6.45V.
I then did something really dumb: I hooked the voltage up to VCC and GND on the module. I should have checked the schematic. The appropriate way to hook it to 5V and GND. Net result, one module no longer responds. I might be able to repair it. Stay tuned for that.
But I then put it on the dashboard of my car and let it sit for the entire workday. After recording something like 1450 images (about 8 hours) the battery voltage had dropped to 5.784V (or about 1.44V per cell) which suggested that they actually had no problem at all. This suggests to me that we probably don’t really need to go to any kind of exotic cell: even at low temperatures, even cheap alkalines will have enough oomph to power the thing for the 4 hours or so that we estimate will fly. I haven’t done the math comparing their relative weights which is another metric we might use in evaluating them.
But in any case, here’s the video, mostly just showing clouds zipping by for about eight hours.
A few other things I learned:
The camera has a fairly narrow field of view. Similar modules are available with fisheye lenses: I ordered one via Amazon, as well as a couple more ESP32-CAM modules to replace the one I killed. I also learned that the AA battery holders I have do not really secure the batteries very well. In the real launch, I should wrap some tape around the modules to keep the batteries from dislodging in flight.
I’m also not sure that the auto-exposure stuff is working entirely correctly. I’ll have to read the datasheet for the camera module a little bit more carefully.
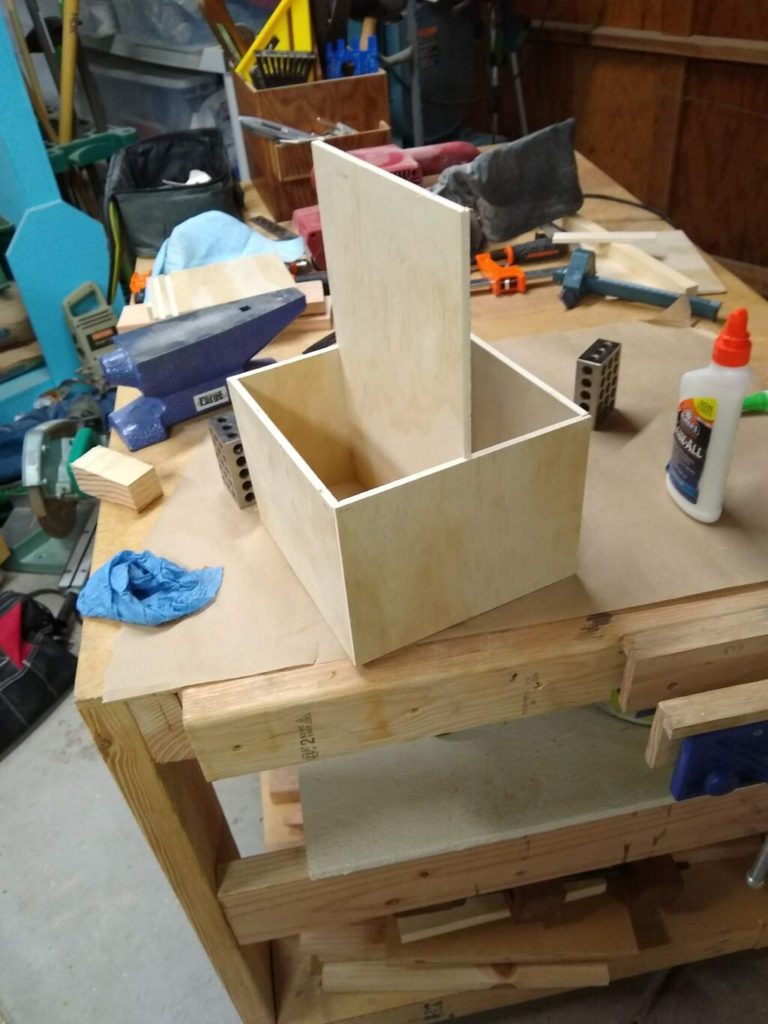
Okay, I had some scrap 1/4″ plywood in the shop, so I decided to go ahead and see if I could make a T-Trak module. I went ahead and ordered some additional Kato Unitrack via Amazon Prime, as well as some really cheap budget scale trees, and set to work. I set the dimensions for the top to be 308mm, and cut the depth to be 14″ which appears to be the standard for single modules. I then cut some 2×2 into 2″ length to serve as corner blocks. I cut the panels to be 2 1/2″ wide, and while I got the front and back sides to be exactly right, the other sides were off in a way that made me believe that the module isn’t entirely square. This made me grumble a lot, and brought out some Wood Bondo to patch some really crufty joints. I haven’t sanded them down, but here’s the basic idea with a 3D printed house, one of my new cheap trees, and two lines of Kato Unitrack roughly placed in the right place.
Voila!
Imagine what this might be like…
The bottom, with bracing blocks and T-nuts. 2″ 1/4×20 carriage bolts thread into the t-nuts to provide leveling.
My woodworking skills are still pretty sketchy to be honest. I still have difficulty getting things cut accurately and square. It was especially important to get the width right: the modules are supposed to be 308mm wide. This is important, because the measurement is equal to the length of a 186mm combined with a 124mm makes 310mm. The modules are sized at 308mm with to provide a little tolerance (a little over 1/32nd of an inch). I’m concerned that my modules are just a little bit too large. I cut two additional tops before I ran out of 1/4″ ply, which I am going to double check against sometime soon. Since I am doing this all by myself, without any other modules made by other people to check against, I am not sure in practice what the tolerances will be.
I should note that the way I assembled this was just with clamps and some 1x2x3 blocks. I didn’t even have my brad nailer, which I loaned out to someone. This made assembly more error prone than I would like, with lots of clamping.
I then noticed that a couple of companies and eBay sellers had laser cut module kits for prices that total up to around $30 for a single module when you include shipping. This made me think to myself “what I could I get them made for?” Services like ponoko.com can do small runs of laser cut plywood to specification in 1/4″ ply, and the design itself is pretty straightforward. I was thinking of dusting off my Fusion 360 skills, but I am beginning to think that using something like Python to generate the DXF or SVG outlines of the pieces. I think I’ll try hacking something together later, and then see if I can use the online quoting system to see what it would cost.
The advantage of laser cutting (at least in my mind) are twofold. It means that I can generate identical modules easily, and the assembly should be easier, since instead of butt joints, we can use finger joints which aren’t really necessary for strength, but which make assembly more straightforward.
But in the meantime, I’ll probably try to plow ahead. Once I get a couple of single modules done, I’ll work on either making corner modules or end caps.
For the rest of today, I’m going to sand down the bondo edges and maybe get some primer or paint on it. If I was going to build some more modules, I think I need to go get some more 1/4″ ply.
Okay, I’m super busy at work these days at work, but I do still have time to muse about projects that I’ll be getting to once my current project wraps up sometime in about 12 weeks. If you were following my blog, you saw that my intention was to get a couple of very small and inexpensive N scale locomotives, and then homebrew a throttle control/power supply using an Arduino and a DC motor control module.
I got that working!
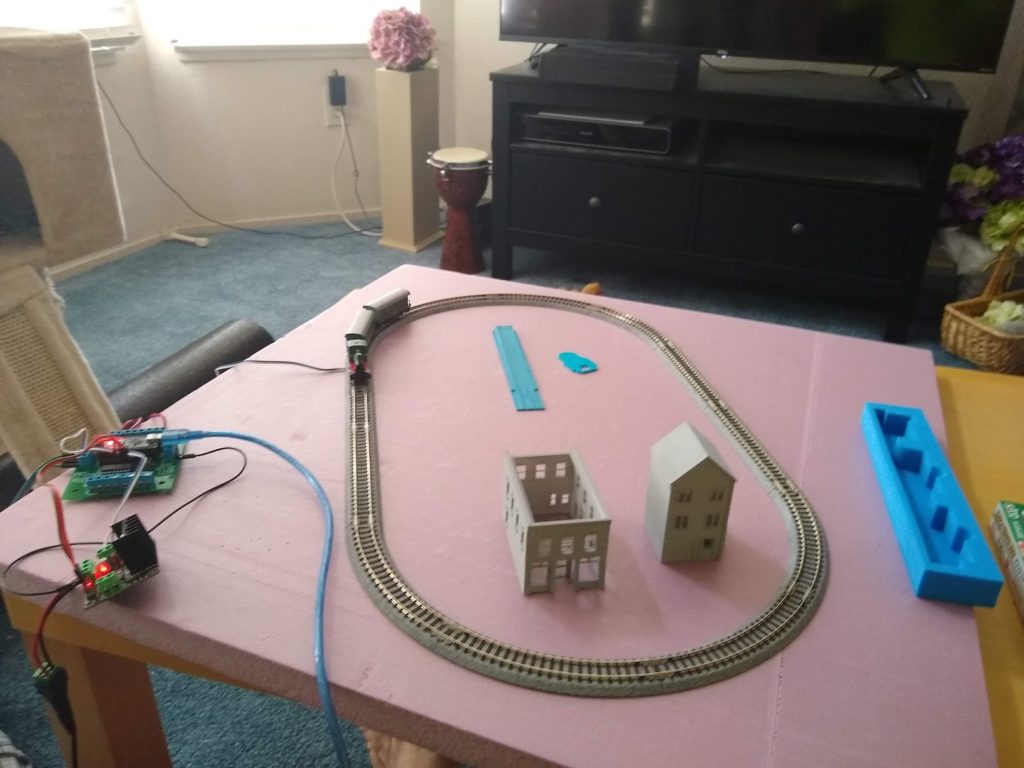
This is just a simple oval of track running on a 2’x2′ chunk of pink foam I got from Home Depot. The locomotive is a little “Pocket Line” locomotive made by Kato. I also got a small trolley from the same line. I haven’t done much with them other than build them a nice little box to hold them:
Anyway, the other day I was in the workshop and was thinking of building a small table to hold the 2’x2′ section, and which I could start building some scenery and the like. But as I was musing the details, I began to think about the possibility of building it as a series of modules instead (or at least, make it compatible with modular standards).
I knew about NTRAK, a modular specification built around the idea of 2’x4′ modules which could be connected together to make bigger modules. I thought that was a pretty cool idea. But the reality is that I didn’t really want to build a large layout, at least not at first (the module above is actually only half the size of a standard N Track module) and I thought it might be overkill.
But while searching around, I found out about T-Trak, an even smaller standand.
It’s a pretty neat for someone who wants to get into model railroad modeling, but doesn’t want to invest a ton of time or money. A single width module is just 308mm wide, and up to 14″ deep, with a pair of tracks that run parallel to each 38mm from the front edge, and spaced 33mm apart. They specify using Kato Unitrack, which is what I used in my oval. Two packs of 4 segments is enough to make two modules, so the track isn’t expensive. You can also make corner segments, and then use them to assemble ovals or other more complex layouts.
It’s perhaps easiest to see how the basic construction looks by watching a video:
Because it’s a standard format, large sets can be chained together, such as the following at the National Train show in 2018:
It seems like a cool way to decentralize development of a large scale setup for a club, but also to enable people to get started without a large investment of time or space.
So, I earlier this week I was working on making a wooden box as part of my skill building in woodworking. Actually I made two boxes, but that’s a different story. Here is the better of the two, made from some scrap cedar fence posts:
Rabbeted the sides into the front and the back, and then a small dado holds a plywood bottom in the box. I was all set to make a top which I wanted to round over the top when I discovered that something was wrong. The locking lever that was supposed to lock the router height simply wasn’t engaging anymore. Odd! Nothing that I knew. Oh well.
Tonight I disassembled the entire thing to see what was going on.
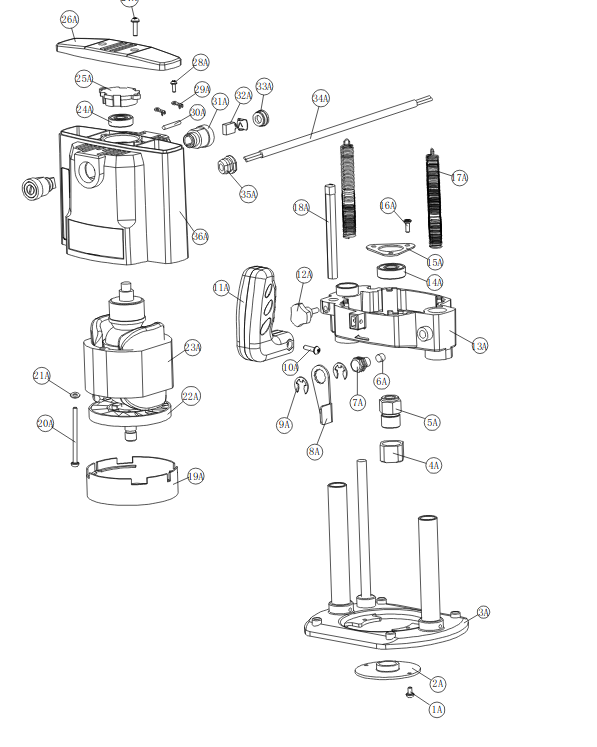
Here is the parts diagram from the manual:
So, on this diagram, the part 8A is the lever that is normally used to lock the router into position. It’s kind of a clunky mechanism, which perhaps is easiest to see demonstrated in this video:
https://youtu.be/1P5gUoJLDtQ
But oddly, the locking lever suddenly became entirely loose. I disassembled the router to see what the deal was. The lever is held against the bolt (7A) by two split ring washers (9A). The slightly odd thing is that the bolt is not actually long enough to directly push against the vertical guide rails. Apparently there is another part (6A, labeled LOCK PIECE) that.. well…
It appears to be entirely missing. I’m not sure how this little essential bit went missing, but I found no trace of it.
So, tomorrow it will be time to call Harbor Freight and see if I can find the little piece as a replacement. The router is less than a year old, so I would like to return it to working order.
But if you took the time to watch the video, you’ll see that this router table isn’t actually very good. There are tons of ergonomic issues and build issues that make it less than a complete joy to use, and I’m beginning to wonder whether a project in my future should be to take one of the two other routers I have in my shop which I got at estate sales, and build a true and proper router table (perhaps with a lift, and a better fence, and better dust extraction).
Addendum: I called Harbor Freight’s Technical Support line this morning. Because the router is beyond the 90 day warranty period (I’ve had it for something like six months, back when I built the table for it https://brainwagon.org/2019/04/13/a-rolling-stand-for-my-harbor-freight-router-table/) they didn’t have much to offer. “We don’t have any parts available”. Well, that’s… not great. I am thinking that perhaps I could replace the entire locking mechanism with a longer metric bolt and a 3D printed knob. I’ll have to have a closer look at it. The other possibility is to try to locate one on ebay to serve as a parts donor. Or give up on this cheap one entirely. Grump.
Addendum: Okay, I disassembled the thing, stripping it all the way down. I imagined that the failure mode was that the little LOCK PIECE 6A had slipped down inside one of the vertical posts. I had to pull basically every visible screw, and at each point I peered, poked and prodded. But finally, just as I was about to give up, I heard a faint rattle, and… voila! A small cylinder of brass dropped out. Huzzah! I wasn’t up to carefully reassembling it tonight, but I should be able to restore it to working condition this weekend. Did I mention that the mechanism is really dumb? It is. But I don’t need to immediately replace it.
Over the holiday I was watching my usual raft of videos on Youtube, and got interested in the circuitry that is inside the common garden light. I have a number of super cheap $1, and if you watch any teardown videos of them, you’ll find that there is almost nothing inside them: typically a solar cell, a battery, an LED, and an inductor and usually a small 4 pin chip. I was interested in running some experiments, so I disassembled one of mine which looks like this model. I hooked up the solar cell to my multimeter, and measured about 2.5v at 12ma or so, for about 30mw of output power. The chip inside was a YX8018, and it also had a AAA NiCad battery which tells me it’s capacity is 160maH. Tiny.
These lights seldom incapable of maintaining a light (even as feeble as it is) the entire night, but I was curious about the circuits, so I went ahead and decided to try to experiment with them. My ultimate goal is to characterize the cheap solar cells, and also monitor the charge cycle of the battery. In the next few days, I’ll setup an Arduino as a data logger, and measure how the current flows in the circuit over a couple of days.
I could have used the scavenged components, but I thought it might be fun to start from scratch, and be able to make several versions of the circuit to compare and contrast. So, I ordered a pack of 20 QX5252Fs (a similar chip to the YX8018, but cheaper) for a little under $2 shipped from China. I had a couple of 100uH inductors lying around, as well as some fairly bright white LEDS. So, I breadboarded the circuit up. Instead of using the tiny AAA battery, I thought it might be good to use a reasonably high quality ENELOOP NiMH battery. Using the simple curcuit from the QX5252F datasheet and some scraps of wire, I put it up on my workbench:
It works. So, over the next few evenings I’ll begin to experiment with it some more. I wanted to experiment with changing the inductor (which modifies the LED current) and perhaps driving more than one LED to make a brighter light. I’m also interested in potentially using this setup to make a very small solar powered microcontroller project, using some additional circuitry as described here. More experimentation is clearly possible.
Readers might recall that I’ve been interested in small solar energy projects. In the past, I’ve played with a 25w solar panel, a Chinese PWM solar charge controller and a 7Ah battery, and I used it as the power source for a WSPR radio beacon that I ran for a few months in my back yard.
But last month I got more interested in using very tiny solar cells to harvest power and power very small applications, like powering garden lights or maybe running very small microcontrollers in low energy applications. So, I ordered 10 small 5v, 60ma solar cells from Banggood for about $1 each.
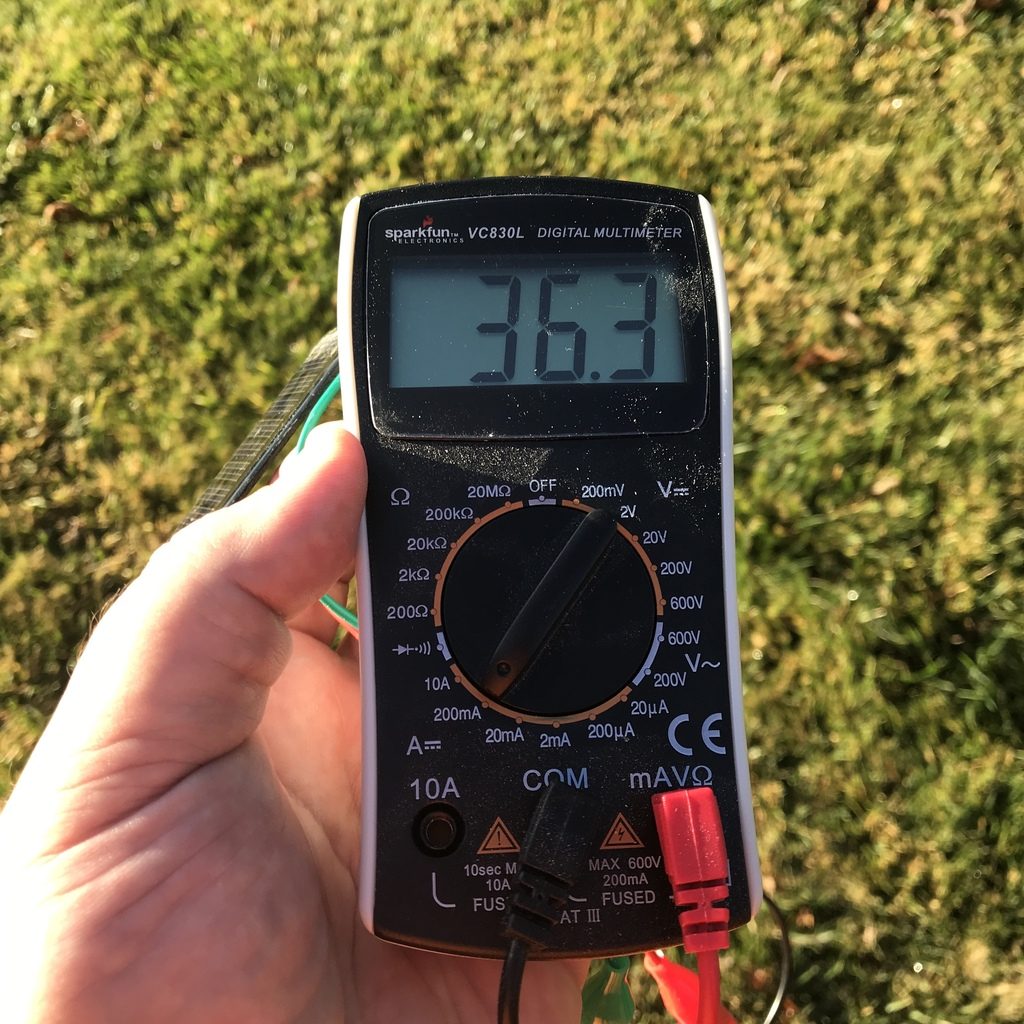
They arrived yesterday. I was feeling kind of bored this morning, so I soldered some clips on one of them, and then went outside with my snazzy Sparkfun multimeter that I got as swag from the Hackaday Superconference and tried aiming it at the sun to see what I got. Mind you, it was only 9:00AM, and we are still in January so the sun isn’t particularly bright, although it was clear.
And the results were pretty good for voltage:
6.1 volts…
But less so for current. I only got about 36 milliamps instead of the specified 60ma. But again, middle of winter, early morning, not too bad.
36 milliamps…
I also decided to see what kind of voltage and current I could get if I oriented the cell unoptimally, roughly straight up.
Voltage drops to about 5.63 volts…And just around 12ma.
The result was about 5.63v at just 12ma, which is perhaps better than I might have expected.
All in all, I’m fairly pleased (although I haven’t tested them all). I suspect I could have gotten similar performance by looting $1 garden lights from Dollar Tree, but I think they will still be useful and will find their way into an experiment later on. I also ordered some QX5252F chips from ebay which should arrive “any day now”. These are popular in homebrew (and commercial) solar garden light circuits. It will be fun to play with them.
In my garage, I’m trying to do some simple skill building exercises to increase my precision and knowledge about how to construct useful objects. The recent kerfmaker and half lap projects that I’ve tweeted about were part of this attempt. Last night, after a full day of chasing pixel problems, I thought it would be fun to go into the workshop and use my kerfmaker to try to make a simple tool tote out of some scrap 1/4″ plywood that I had lying around.
I had gotten a tool tote for $1 or so at some garage sale, and had found it so useful that I had constructed a very similar tote myself a month later. But that tote was all butt joints and had the bottom merely cut to size and glued to the bottom, and I used brad nails to hold it together along with glue. I thought that maybe I make a similar (but slightly smaller) tote. I spent an hour and a half, and put together this:
Each of the sides is 8″ side. The front and back are rabetted and have a central dado to take center divider, and a dado to hold the bottom in a recess. The two sides just have the bottom dado. I dried assembled, and things looked “okay” (more on that later) so I glued the side joints, and assembled the four sides and bottom (the bottom just rested in the dado without any glue) and let it dry. I’m going to taper the middle and cut a slot in the center divider to serve as a handle. My experience with the similar tote I made before is that the properly glued joints will be plenty strong to handle whatever load I’m likely to put in it.
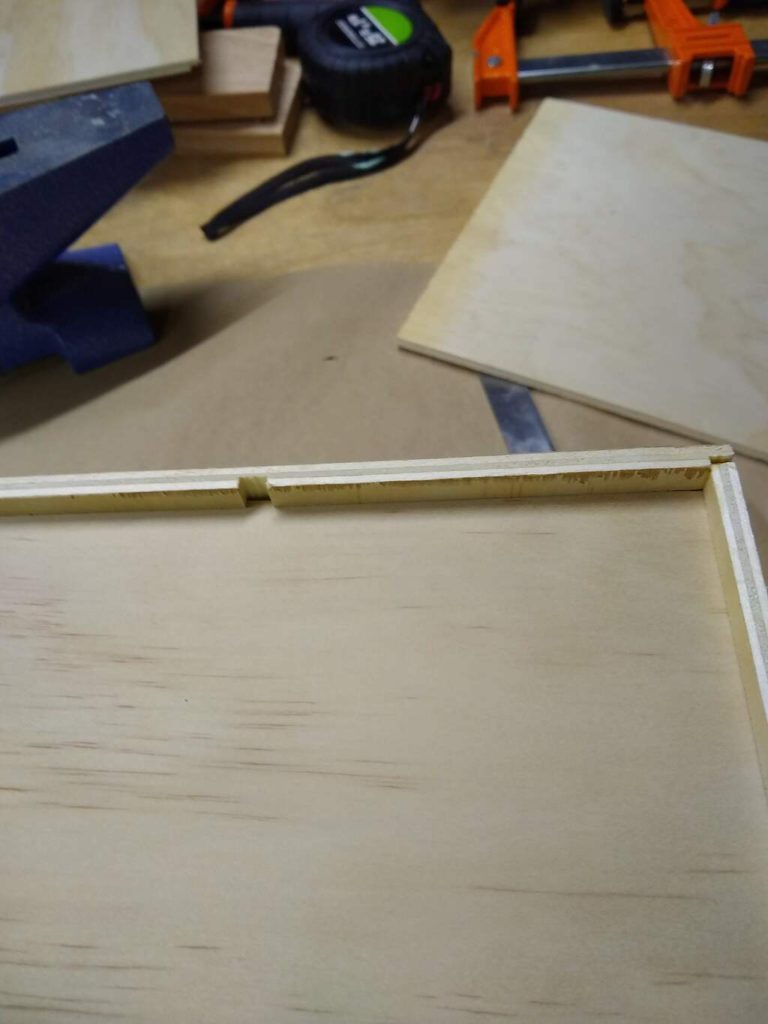
It looks pretty good, but there are a few niggly details, most notably that it doesn’t rest entirely flat on the desk. That is because the corners look like this:
The front panel here slightly protrudes. I believe this is because the dado I cut to receive the shot isn’t 100% parallel to the bottom, and so when I clamped the bottom in place, it pulled these sides out of flush/square by about 1/2 mm. Oh well, that’s what my sander is for.
Some other pictures below. If the mood suits me, I’ll finish the tote in another evening or so.
Closeup of the center divider fit into the side.Minor nit, the dado in the sides protrudes through the bottom. (Shrug). The bottom is nicely offset and dadoed into all four sides, and isn’t glued.The center dividing dado. Looks pretty clean. Could be just the tiniest fraction tighter, but slides in well.
On one of the Facebook model train groups I was in, I read an article about someone who was building a transistorized throttle based upon a design called the “Pacematic”. I did a bit of googling, and found this description. It seems like a relatively simple circuit based upon the 555 timer. I started digging around and also found this page which lists a lot of transistorized circuits for driving model trains:
I find this kind of stuff fairly interesting. Still, I think these circuits are mostly of historical interest. Now, with the availability of cheap microcontrollers and DC motor drivers, it seems like you can make far more versatile and powerful throttle control circuits. As soon as my new N scale network gets up and running, I’ll have an update of what I’m doing.
I am still an absolute rookie woodworker, which means that time spent in the shop doing the most basic skill building exercises can be fun. My previously mentioned “skill building” exercise of making a pair of simple boxes had met with the approval of our supurrvisor.
Js there catnip in here?
I cut all the rabbets for these on the table saw using my (pretty crude) cross cut sled. I had used it before to make a simple set of small display shelves, but had mostly laid out and cut dadoes by hand, with the net result that some were tight and some were loose. All in all, it made things a little fussier than I would like. That’s when I learned about a gadget known as a kerfmaker: a little adjustable spacer block that you can use to cut perfect dadoes using your table saw without any tedious and error prone measuring. Rather than explain the theory, I’ll point you at the video that I used as the basis of mine, which shows how to make one and served as the inspiration for mine.
From the excellent “Pask Makes” channel, you should subscribe.
Without further ado, here is the one I made.
A couple of notes. I still have mostly soft wood 2x4s as scrap around, as I haven’t had the confidence to ruin nice hardwood with my experiments. So I went out and spent a few bucks to get a small piece of cherry from Home Depot. This piece was cut from a piece which was 0.75″ x 1.5″. The first thing I did was cut it to rough length and then cut the rabbets in each side on the table saw. I screwed up my first one, so ended up ripping the overall size down to just 1″ wide, and I still managed to slightly botch the rabbet, but it was serviceable. This made the overall width of the jig rather narrow, which means that if I use it with some stop blocks, they have to be fairly narrow themselves. I’ll probably make a second one and do a better job.
Ideally when you rabbet this piece it will be perfectly split the piece in half, but if you want an error, you probably want to leave the tongue side slightly wide so the washer will grip the sliding part tightly.
I used 1/4″ hardware on mine because I use 1/4″ hardware all the time and that’s what I have lying around. I also printed some knobs on my 3d printer that house a nut. This had an advantage that the nut is a bit smaller than your typical 1/4×20 wing nut. Were I to do it again, I might strongly consider using smaller hardware (say, a #8 machine bolt), but I think the 3d printed nuts are really nice.
I also should note that I screwed up the set screw on the end. I had some 1″ #8 woodscrews. You want to make a pilot hole in the end. Rather than just selecting a small screw by eye, I looked up what the size should be on a table on the Internet, and it suggested 11/64″ for hardwood. I selected that drill, drilled the hole, and went to add the #8 screw and it was WAY too big. It appears that I read the table wrong (the column was for “tapered drills” which seems really annoying). As it happens a #10 wood screw would work okay (it bites in, but turns a little easy), so I just did that instead. When I build my next one, I’ll use #8 and do a better job.
I found a scrap of really crappy plywood and tried to do my first test. It was a bit loose, so I loosened the offset screw a little bit and tried again. The second attempt resulted in a nice dado that wasn’t hard to assemble, but was tight enough that friction would hold it in place. Huzzah!
One last thing: the overall size of my kerfmaker is six inches, and is sized so it would reasonable work to cut half lap joints in 2x4s. I think if we made a smaller one it would be pretty useful. I also think that it might be a good time to make a better (and wider) version of my cross cut sled, perhaps with a T-track along the top to clamp and hold stop blocks.
A friend of mine pointed out an interesting website today: applesearch.org. This is well and truly off my normal set of blog topics (as ill defined as those might seem) but I must admit that I find it fascinating.
See, apples are fascinating.
Most people can name five or six varieties of apples, and if you dig you might be able to come up with a dozen or so. But there are over 7,500 known cultivars (CULTIvated VARietys) of apples. Apples have been cultivated for a long time and used for a wide variety of purposes: for storage, for fresh eating, for cooking, for making cider, and even for livestock.
But this huge diversity of cultivated varieties are being totally dominated by just a few varieties which are selected mostly for looks and their ability to get to market in a cosmetically appealing state. No greater example need be presented than the misnamed “Red Delicious” apple, which is actually red, but to my taste is cruelly misnamed. I am not alone in this opinion. They are generally mealy and not at all to my liking, and its popularity has been falling since the introduction of other commercial varieties.
The story of the Red Delicious is an interesting story in itself.
But there is also an interesting genetic mechanism at work that has allowed so many different cultivars to be developed.
The odd thing about apples is that if you grow an apple tree from seed, chances are excellent that the fruit produced will be almost completely unlike the fruit of its “parent” tree. Apples possess a property called ‘extreme heterozygosity’. The entire industrial production of apples relies on grafting: taking stock from a particular tree that you like, and literally adding that branch to a new sapling where it can develop into a clone of the existing stock. This can even lead to “multi-grafted” apple trees, where several different varieties are grown on a single tree.
Anyway, I think that apples are cool.
Back to applesearch.
It’s the work of a gentleman named Tom Brown, who sees the dwindling of variety in apple cultivars to be something that he’s willing to dedicate his time and enthusiasm to combat. He basically goes around doing research and trying to identify varieties of apples which were thought to be lost, and find living stock. He does this largely by talking to old people about apples. He then cultivates them and makes them available to others who many wish to keep the varieties alive.
I think that’s a pretty darned cool way to spend your life.
Addendum: I rather like Pink Lady apples for applesauce.
The recipe couldn’t be simpler. A pound and a half of apples. Cut and cube up. If you have a food mill, then don’t even bother peeling. Add 1/2 cup of water, 3 tablespoons of sugar and a tiny amount (1/4 teaspoon) of cinnamon, and a dash of cardamom if you have it. Cook for 20 minutes over medium heat until the apples are soft. If you have the food mill, run it through that and all the peel will be left (although it will lend a rosy pink color to the sauce). If you peeled them, you can just have at it with a potato masher.
Home made applesauce (particularly the fresh sort like this) is delicious.
I’ve had a couple of DC motor control modules lying around unused for quite a while. I think that I bought them for a simple robot project back in 2013 that apparently wasn’t quite simple enough: I got distracted and never went anywhere with it. But I was watching some videos as part of my holiday binge of model railroading videos, and projects like DCC++ used the LM298 to supply power to the rails of a train.
I dug around in my box and found a couple of these modules, and thought I’d spend a little time figuring out how to use them. I’m not going to be using DCC, but am instead just going to be using ordinary DC trains, so there really isn’t any difference between a model train and any other form of DC motor. I had a pair of Pololu gear motors lying in a box, so I dusted one off and wired it up.
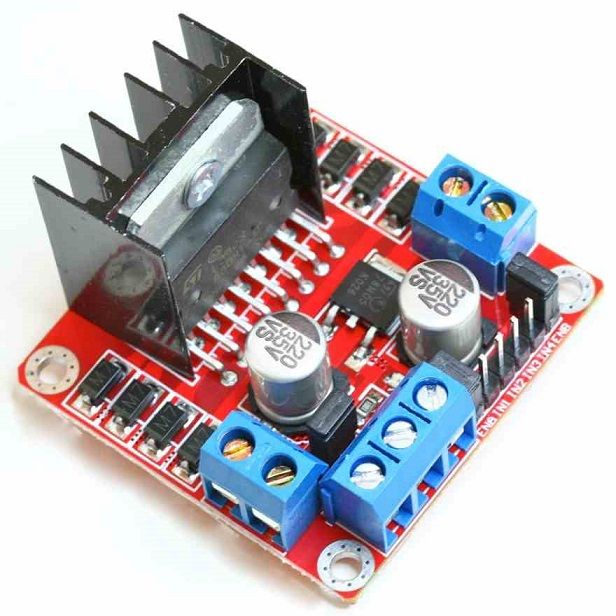
It’s a cute module really.
It can control two different DC motors that are connected to the pair of screw connects on the left and right of the module. On the front, you attach a power supply for the motors, with the 12V going to the leftmost of the three connections, with a ground to in the middle. If the jumper on the board is present, it will feed that to an 7805 voltage regulator, and provide it to the rightmost screw terminal as well as using it to power the module itself. You can use it to power an Arduino if you like (tie the ground and 5v to the GND and VIN for the Arduino). I didn’t bother, and instead tied the ground. In addition, I wired the leftmost ENABLE pin on the module to pin 3, and the IN1 and IN2 signals to pins 6 and 7 respectively. (I could se
Then, I set down to write some code. I didn’t have a pot or rotary encoder handy, so I thought I’d just write a simple test program that read commands and moves the motor. It’s a series of single line commands. ‘A’ or ‘B’ will switch to that motor. ‘F’ or ‘R’ will tell the motor to go forward or background. ‘0’ will disable both motors. ‘S’ followed by an integer (from 0 to 255) will set the speed of the motor.
It worked the first time I got it to compile.
// l298 test
//
// a simple program written to provide a basic serial test program
// to test a small L298 motor driver board and my understanding of it.
//
// The L298 basically uses three digital pins to drive a DC motor.
// - an ENABLE pin, which we will drive with a PWM signal to
// implement speed control and
// - two INPUT pins which define the direction.
// if both are high or both are low, then brakes are applied
// if the first is high and the second low, then the motor is driven forward
// if the first is low and the second high, then the motor is driven reverse
// These pins need to be PWM (analogWrite capable are 3, 5, 6, 9, 10 and 11
// on the Arduino UNO/Nano).
const int ENA = 3 ; // enable for the A motor
const int ENB = 5 ; // enable for the B motor
// these two pins control the direction of the A motor
const int IN1 = 6 ;
const int IN2 = 7 ;
// these two pins control the direction of the B motor
const int IN3 = 8 ;
const int IN4 = 9 ;
const char * version = "L298 TEST compiled on " __DATE__ " " __TIME__ ;
int channel = 0 ; // select 0 (A) or 1 (B)
void
setspeed(int s)
{
// default arduino PWM is about 490 Hz, and uses an 8 bit value
analogWrite(channel ? ENB : ENA, s) ;
}
void
setdirection(int d)
{
if (d) {
digitalWrite(channel == 0 ? IN1 : IN3, HIGH) ;
digitalWrite(channel == 0 ? IN2 : IN4, LOW) ;
} else {
digitalWrite(channel == 0 ? IN1 : IN3, LOW) ;
digitalWrite(channel == 0 ? IN2 : IN4, HIGH) ;
}
}
void
setchannel(int c)
{
if (c == 0 || c == 'a' || c == 'A')
channel = 0 ;
if (c == 1 || c == 'b' || c == 'B')
channel = 1 ;
}
char cmd[80] ;
char *cp ;
void
processCommand()
{
int op ;
int val ;
Serial.print("CMD: ") ;
Serial.println(cmd) ;
op = cmd[0] ;
if (islower(op))
op = toupper(op) ;
switch (op) {
case 'A':
case 'B':
setchannel(op) ;
break ;
case 'S':
val = atoi(cmd+1) ;
setspeed(val) ;
break ;
case 'F':
case 'R':
setdirection(op == 'F' ? 1 : 0) ;
break ;
case '0':
digitalWrite(ENA, LOW) ;
digitalWrite(ENB, LOW) ;
break ;
}
}
void
setup()
{
Serial.begin(115200) ;
Serial.println() ;
Serial.println(version) ;
// magic incantation to lower the PWM frequency
// the motors that I have have an annoying resonance at the default
// frequency (490Hz). Lowering it to just 30Hz seems to help, and
// also makes the motor actually function at low speed.
// https://etechnophiles.com/change-frequency-pwm-pins-arduino-uno/
TCCR2B = TCCR2B & B11111000 | B00000111 ;
pinMode(ENA, OUTPUT) ;
pinMode(IN1, OUTPUT) ;
pinMode(IN2, OUTPUT) ;
pinMode(ENB, OUTPUT) ;
pinMode(IN3, OUTPUT) ;
pinMode(IN4, OUTPUT) ;
cp = cmd ;
}
void
loop()
{
int c ;
while (Serial.available()) {
c = Serial.read() ;
if (c == '\n') {
*cp = '\0' ;
processCommand() ;
cp = cmd ;
} else {
*cp++ = c ;
}
}
}
But there was something interesting. By default, the PWM on pin 3 of the Arduino runs at around 490 Hz, and you could definitely hear it resonate when driving the motor. At very low speed, the motor actually didn’t move, but just vibrated at around 490Hz. I looked up a website that told me how to adjust the default PWM frequency. If I raised it, the motor didn’t move unless I set the value pretty high, but the whine wasn’t super audible. When I lowered the PWM frequency to around 30hz, the motor actually worked better at low speed, and you could hear the low switching tone, but it was less irritating. I hooked up a scope and observed the relatively large inductive spikes.
I’ve no real experience with motor control and things like EMF. I’ll have to do some more reading. But for now, I think it will work. Cool.
Carmen thought I should spend a little more time in the shop today. I didn’t have anything in mind, but while poking around we found a chunk of cedar fencing that I had used as a test for my jointer. We had jointed it down to around 0.47″ thick, although it wasn’t particularly uniform: I hadn’t gotten my thickness planer back then, so it’s quite possible it had a fair taper in thickness, and it was by no means flat.
But it was cheap, and lying around, so I thought that it might be fun to practice making some simple boxes. The idea was to simply cut some lengths of the board to 5″, and cut rabbets 1/4″ wide and 1/4″ deep on three sides of each of the four pieces that will form the side and on all four sides of a fifth piece that will serve as the bottom. I used my (not very accurate) cross cut sled and set it with a stop block so it would cut a slot half the thickness of the board, and then adjusted the table saw so it would cut half the thickness high. I don’t have any gauge blocks, so I just used a drill bit and adjusted it so the teeth were flush with a 1/4″ drill bit. I then just “nibbled” the rabbet out with multiple passes.
It took me about fifteen minutes to cut all the rabbets on the ten pieces. I then squirted some Titebond II into the joints, and clamped it all together. The fit wasn’t amazing, but was credible and a little sanding (especially on this super soft cedar) will probably tidy it up to reasonable levels. I’ll get a picture tomorrow when its done.
Every time I do one of these projects, I try to think about how I could have done it better. I think a few sources of error are likely:
The lumber was cheap, soft and really warped. You can’t expect micron precision from a board which has over a half inch of bow in its six foot length.
The lumber was not sized properly. If I really cared, I’d probably joint one edge and one face, then rip the stock to a consistent with and run the stock through my thickness planer.
The most obvious problem is that my cross-cut sled isn’t particularly square (I suspect about 1/4 degree or so, which actually adds up to around half a millimeter over a five inch span). I should try to make something better in the future.
I also am using a conventional sawblade which leaves a somewhat jagged profile, it would likely be better to use a flat bottom blade.
But in any case, a few passes with my random orbit sander will turn the box into something that I could finish with some Danish oil or poly and used to display dried flowers or hold keys or … well.. it’s a box.
Still, a very simple box, and a nice little shop project to close out 2019.
Happy New Year’s Eve, all.
Addendum: here is the box out of the clamps. It’s not amazing or anything, and because of the warping and general unevenness of the material, the joints aren’t as even or as tight as I like. But as I said before, a couple of coats of wipe on finish and it will be a useful little container for flowers or keys or whatever. It’s also pretty good practice for making drawers.
“It’s a box. Only a bit more sophisticated than a block of wood.”The bottom had some tear out, and is about 1/2 a mm off, but with some sanding will likely be just fine.
This isn’t the most amazing way to make a box. The more “proper” but still easy way would be to use a technique like this, but I don’t have a dado stack for my saw, and it would (I think) require a change in the setup to cut with a narrower blade. Still, I might give it a whirl anyway. My next bit of shop furniture will almost certainly include drawers, so I need the practice.
Addendum to the Addendum: No doubt some will complain that the way I did this was wrong: that you need a dado to hold the rabbeted bottom into the drawer, and that only using glue is a recipe for disaster. I’ll defer to more talented and experienced woodworkers than I to answer this criticism (although I must admit that I think his generalization of his small scale tests to larger scale tests is completely off base, and there is every reason to believe that the strength of a drawer bottom that is glued in place drops as the size goes up, not increases as he suggests). But in any case, the wood here is very soft and frankly weak, and this isn’t meant to hold a great deal of weight or take a beating. And, it was just a practice. When you build stuff in your workshop, you can build it to your expectations.
Yesterday I did some work in the shop, finishing up a couple of small projects and prototyping a small display shelf for Carmen. The result was a fair amount of sawdust everywhere, so today I spent some time today vacuuming and tidying, putting away tools and generally just enjoying being in the shop. It just felt virtuous.
But I’m actually pretty bad at organization, so it took a while.
One of the things that I have trouble keeping track of is just pens and pencils. Carmen had actually bought me an actual box of Pentel GraphGear 1000 pencils (actually, the PG1015, with the 0.5″ lead, which are truly awesome incidently, highly recommended) for me to keep in the workshop, but it is shocking the number of times I put down a pencil and then seemingly can’t find it again.
While cleaning, I decided that I should make a single place where I can put my pencils, in the hope that I will actually keep track of them. So I picked up a chunk of 2×4 that was lying on the ground and instead of continuing to clean, I made more of a mess, albeit in the interest of organization.
It’s really nothing but a block of wood with some holes bored in it.
Okay, I did a bit more. There are two offset rows of holes of different sizes. The back holes are 7/16″ which is good enough to hold my new mechanical pencils as well as Sharpies. The front row of holes are 5/16″ in size, which is good for regular pencils, as well as a couple of small handy screw drivers. I did a little bit of shaping. Each end has a 22.5 degree bevel and the top is sloped by 5 degrees. I also cut a couple of shallow grooves on my table saw just to make it look nicer. I sanded it down with some 120 and then 220 sandpaper, and then rubbed on a coat of Danish Oil. It took about twenty minutes to make, most of which was boring holes.
Hopefullly I’ll now have a place to return my pencils to, so the investment that Carmen made in nifty mechanical pencils will not be wasted. This is actually just a prototype: I want to build a more elaborate caddy that includes some other spaces for basic tools like a small ruler, a small square, a couple pairs of pliers, my complete set of small screwdrivers, and maybe even some Allen wrenches. But we’ll see how much this helps first.
I’ve got a week off before crunch time really begins at work, so I’m home enjoying the company of the missus and just relaxing. And, for some reason, I’m thinking about model trains.
Mind you, I’ve always been pretty interested in model trains (and model making in general) although it never really rose to be a real hobby of mine. But something tickled my brain recently about it, and I’ve been doing some reading and watching of YouTube videos, and thought I’d write down some thoughts here.
I think that part of what got me thinking about this was realizing that unlike the old DC/rheostat control that was typical when I was a kid is no longer the only game in town. Traditional DC control had no intelligence whatsoever in the train. The tracks basically form a DC power supply for trains. Higher voltage on the rails makes the train go faster. But this means that you can’t really run two trains at the same time: they would both get the same voltage and would have to move in tandem. But even that doesn’t really work out, as the two locomotives likely respond to voltage differently and one would rapidly catch up to the the other.
Thus, if you are going to make large layouts, you end up dividing your track into zones, with complicated switching and separate power supplies and throttles to help you move trains between zones without creating a short circuit. Indeed, making such complex networks is part of the attraction for some in the model train hobby.
But advances in electronic control mean that it’s possible to do things a different way, by embedding some intelligence in the trains, and using the track not just as a simple power supply, but as an actual communication and power bus that can send control signals to individually addressed locomotives. The most popular of these seems to be DCC, or Digital Command Control.
The basic idea of DCC is that instead of using the rails as a simple power wire, the wires now encode a digital signal which can be used to transmit data packets to locomotives or other accessories like switches. Let’s call the two rails A and B. In a normal DC train, the difference between the two voltages on A and B would be considered the control signal. More voltage makes the train go faster. Reversing the polarity makes the train reverse direction. But in DCC, rail A and rail B are always of opposite polarity. The trains work by rectifying this essentially AC signal to provide a DC power voltage that they can then adjust (via a buck converter, essentially) to power the motor. But in addition to providing power, the signals convey digital information to the locomotive by flipping polarity. If the polarity switches in around 58us, then a 1 bit is being sent, where if the polarity shifts on something more like 100us, then it’s a 0 bit. The DCC specification tells you how you can form data packets. Decoders built into locomotives or track accessories have addresses, and so you can send data to individual items on your network. This means that you can have two locomotives (or more) sharing the same section of track, but getting independent control signals to tell them to move independently.
Neat.
But frankly, kind of expensive. Instead of just a transformer with a knob, commercially produced “command controllers” are significantly expensive, running well over $100 and up to several hundred dollars. That seems pretty steep.
But then I started reading about some clever guys who decided to use Arduino controllers to build their own command stations. The basic realization is that an Arduino combined with a Motor Shield (which is really just an H-bridge) can (with the addition of proper software) generate the necessary signals onto the track to control DCC ready locomotives. And luckily, someone has already gone to the trouble of writing the software. The basic details are described pretty well here:
It should be noted that in reality you can probably build the system for about $10 by ordering parts from China.
But I don’t have a fancy DCC equipped locomotive, and don’t think that spending money to get one is the best way to start working in a hobby I’m not sure is going to stick. But I got to thinking about it, and realized that I could use the same hardware to make a simple DC controller too. I’m not the first to think of that, in fact, the same guy who made the video above suggested it:
In a binge of thinking about this, I signed up for a couple of Facebook groups on budget model railroading, and someone asked the question “why aren’t people using wireless/bluetooth for this kind of stuff?” And that is actually a very good question. It coalesced with some thinking that I had been doing, which basically fall into the “why aren’t people homebrewing more control electronics for model trains?” After all, services like JLCPCB enable you to make professional circuit boards for very cheap. Arduino Nanos cost about $3 each, and a similar cost for LM398 H bridge modules. And sensors of all types are actually easy to get.
Projects like DCC++ are great because they allow interoperability with commercial modules and locomotives, but what if you didn’t actually care about that? One thing that I thought was pretty antiquated was that while it is pretty straightforward to send signals to locomotives, DCC doesn’t do a lot to help you get signals back from sensors around the layout.
I began to wonder if someone else had gone down this path. And a gentleman by the name of Steve Massiker has. He has the website arduinorailwaycontrol.com which is pretty nifty. He has a board he calls the URB (Universal Railway Board) which is basically just a motherboard for an Arduino Nano and a Darlington driver chip (the ULN2003, which is common and cheap), and communicates with other such boards via the I2C bus and with your phone via Bluetooth. Very neat. What’s super cool is that he also has the Gerber files available for free download, so you can have them made up with your favorite PCB board manufacturer. I was sufficiently intrigued that I ordered 5 from JLCPCB for $18 with DHL shipping. I should get them next week.
All this pondering may result in nothing. In particular, my job is taking up a lot of my time, and I think about far more projects than I actually start, and start far more than I finish. But I am going to keep this in the back of my head.
Any of my readers actual model railroad enthusiasts? Feel free to get to me via twitter or leave a comment below.
Brace yourself for old guy reminiscing about the past.
Back in 1980, I was a sixteen year old kid with a goal: to buy my own computer. I spent a year mowing lawns and doing chores, mostly for my grandmother, and slowly began to tease together money. By the end of the year, I had saved up somewhere north of $300, and my mom had agreed to fork over the rest of the money to purchase an Atari 400, which if memory served was around $429.
This was the catalyst for a lot which came after. My interest in computers, my major in college, my love affair with computer graphics and ultimately my career all started with the ability to program a computer that didn’t even have a storage device (I’d eventually get a cassette drive, and later an Atari 810 disk drive). The Atari was the start of it, and I bless my mom and my grandmother for giving a sixteen year old the chance to get started in something that frankly seemed like a pointless extravagance.
My life could have gone a significantly different way.
Lately I’ve been interested in restoring old tools, largely as part of getting my shop up and running. It just feels virtuous somehow to take old tools and get them able to be used again.
And so, my current spare time project: to get my Atari 400 up and running again.
Yes, I still have it, along with an Atari 130XE that I believe was my brother’s, and the Atari 810 drive and an Atari 1200 baud modem. They passed around and somehow I never chose to get rid of them. But they hadn’t been turned on in something like 20 years.
Until a few weeks ago, when I decided to try it. I recorded a bunch of short videos on my iPhone and made a playlist of them. They weren’t scripted, rehearsed, or even edited, but I made this playlist of them.
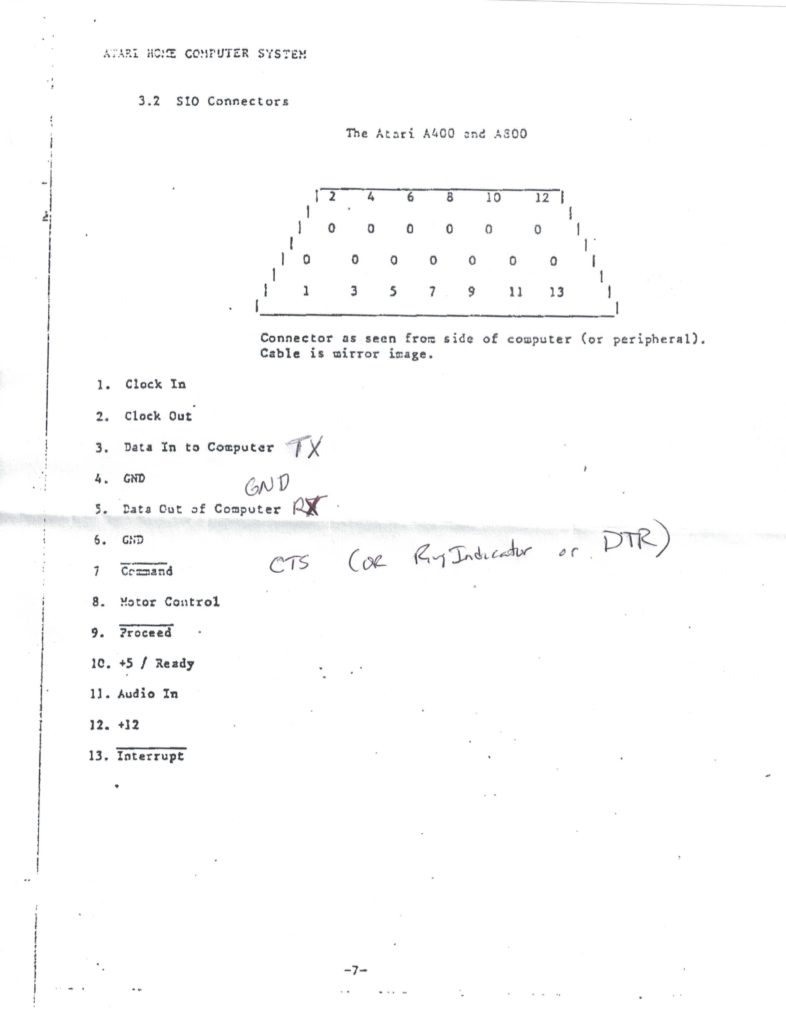
The culmination of this was to actually boot the Atari from a floppy. But again, as I said I do have a floppy drive (in as yet undetermined condition) but I read that there was a way to make a serial cable that could make your laptop serve as a floppy disk drive. As it turns out, it’s really easy. While the Atari SIO connector has thirteen pins, it turns out that you really only need four of them to be connected, and that can be done by with a standard FTDI USB to serial converter.
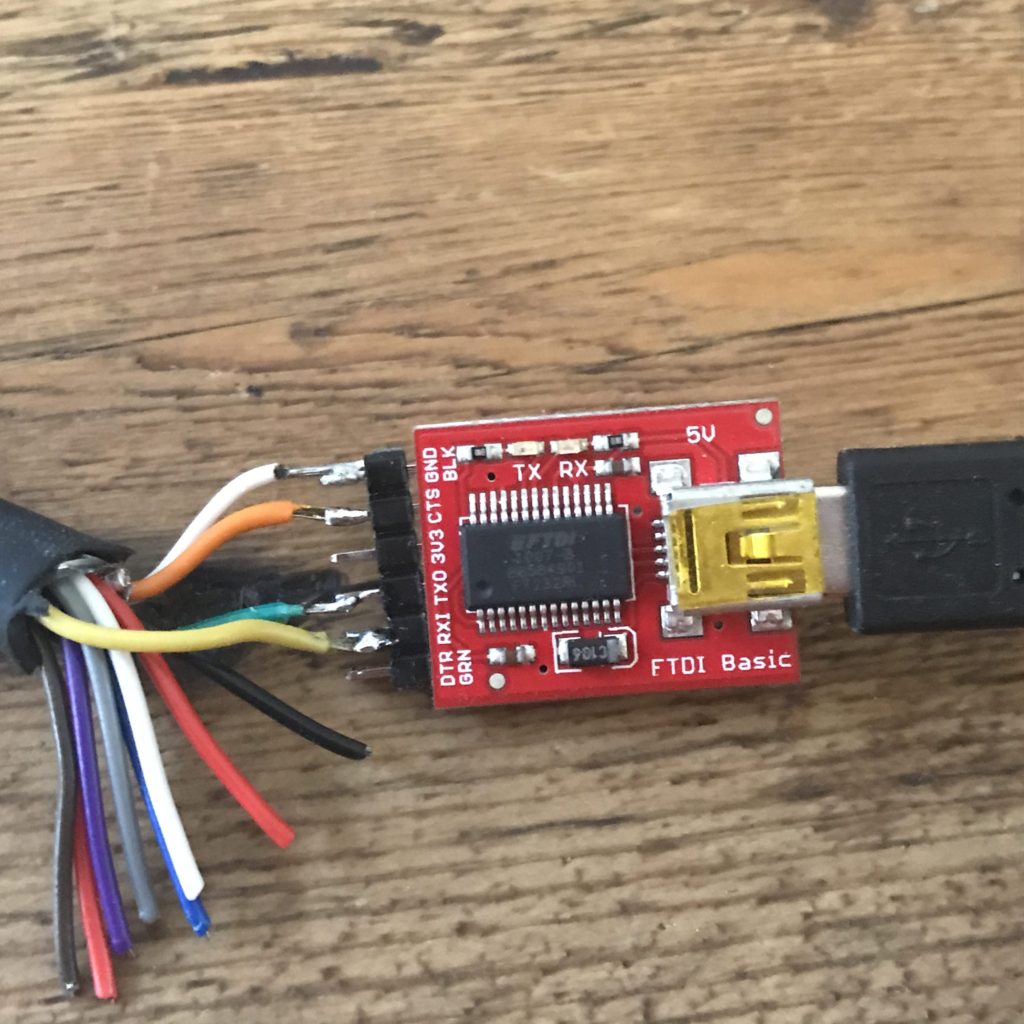
I didn’t film my assembly of one, since it turned out to be so simple. I cut apart my spare (somewhat bedraggled) SIO cable, and then just stripped and soldered the wires to a small row of male header pins so that they could be connected to the Sparkfun 5V FTDI USB/Serial adapter. Here is a closeup that pretty much tells you the entire story:
This is all there is to the cable…
I’ve no idea whether the colors inside Atari SIO cables are standard, so you might want to double check using my notes below. On my cable, ground was actually a white wire with a black stripe (hard to see above) and there is a seperate white line, so double check.
I used the RespeQt software which worked perfectly. The only configuration that I had to do is to tell it to use the CTS pin for command in the settings, and then it worked just fine. I explained it here, just a couple of minutes after getting it to work. I downloaded a disk image for Atari Dos 2.5 from the Atari Wiki, and we were good to go.
I am not sure what is up next. I want to find my Atari BASIC cartridge, and make sure that the cartridge slot is working fine. I’ll probably order a box of 5.25″ floppies from Amazon and see if I can get my Atari 810 drive working. And, I have a minor programming project that might be interesting, perhaps including doing something for the this year’s retrochallenge, although with work beginning to accelerate, I’m not sure that dedicating myself to even ten hours of work is something that I want to do. But… I’m still pondering. Stay tuned.