It’s no secret that I’ve been a fan of the Arduino. More than any other board, it’s got me into hacking little bits of hardware and programming in the small, and has been part of numerous projects that I’ve tinkered together, and others that I’ve helped mentor young people with. It’s a cute platform for a number of reasons:
- They are widely available.
- They are reasonably (well, sort of, more on this later) priced.
- They are supported on all major platforms: Linux, Mac OS X and Windows
- Their programming environment is a single, simple download.
- Their programming libraries allow people to get started quickly.
- There are a fair number of good shields to do hardware expansion.
- And perhaps most importantly, they have a large community of people who develop and share code and techniques.
By my estimation, no other platform has this set of features.
Sadly, it appears that there is trouble in paradise. From this article on Hackaday:
Arduino LLC is the company founded by [Massimo Banzi], [David Cuartielles], [David Mellis], [Tom Igoe] and [Gianluca Martino] in 2009 and is the owner of the Arduino trademark and gave us the designs, software, and community support that’s gotten the Arduino where it is. The boards were manufactured by a spinoff company, Smart Projects Srl, founded by the same [Gianluca Martino]. So far, so good.
Things got ugly in November when [Martino] and new CEO [Federico Musto] renamed Smart Projects to Arduino Srl and registered arduino.org (which is arguably a better domain name than the old arduino.cc). Whether or not this is a trademark infringement is waiting to be heard in the Massachussetts District Court.
According to this Italian Wired article, the cause of the split is that [Banzi] and the other three wanted to internationalize the brand and license production to other firms freely, while [Martino] and [Musto] at the company formerly known as Smart Projects want to list on the stock market and keep all production strictly in the Italian factory.
Yikes.
I tend to side with Massimo for two reasons: one is, I’ve met Massimo at the San Mateo Maker Fair, and he was a nice, friendly, interesting guy. Second is that I think the value of the Arduino platform lies in design, rather than manufacturing. I’m willing to pay a premium for a product if it supports a company that provides excellent community support, and by and large I think Arduino LLC has done a good job. The motives of Arduino Srl seem much less community based, and more based upon maximizing the amount of money they can extract from the community.
I could be wrong, but that’s what it looks like to this observer.
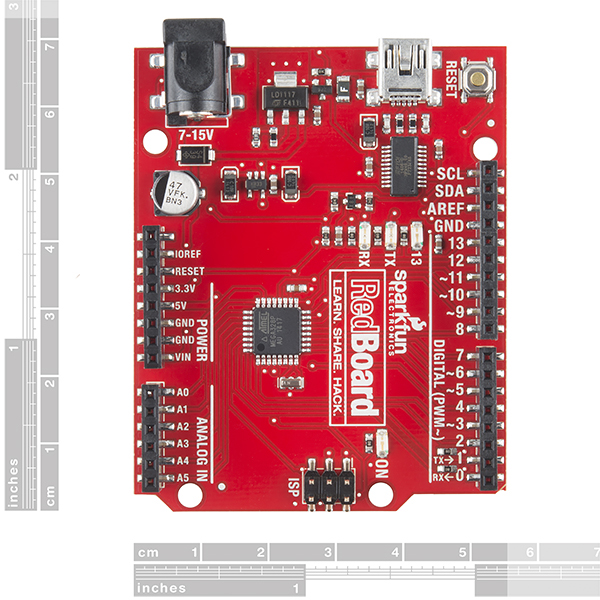
But the fact is, both sides seem to be (to paraphrase my good friend, Tom) “burning down the tree of awesome, only to sow the weeds of suck”. This kind of public spat expends a lot of the good will that the community has, and only serves to drive people to other platforms, or simply Chinese clones of the existing products. Because here’s the other thing: there is not a lot of secret sauce in the Arduino. It uses a very popular 8 bit processor, but one which is underpowered and overpriced relative to other 32 bit chips on the market. If you wanted to build an Arduino yourself, it’s really easy to do with only a few parts, and the guys at arduino.cc will even tell you how to do it. The optiboot bootloader is open source. You can program them with avr-gcc and avrdude, also open source products. If your company is not going to work to support the community as a whole, it’s awfully hard to justify spending $25 for an official Uno when you can buy a compatible Red Board from Sparkfun (a great company that does lots of great work with the community) for $20, or the Diavolino kit from Evil Mad Scientist for just $13, or Chinese clones assembled for $13 or less. And of course companies like Seeedstudio are manufacturing clones as well as new designs which share the footprint of the traditional Arduino, but use ARM chips (like the Arch, a $20 board that uses a NXP LPC11U24, a 32 bit ARM chip that runs at 48Mhz).
To be honest, I’ve been looking to find a better development platform. You don’t have to go very far to find more capable boards: consider the Raspberry Pi Model A+, which sells for a piddling $21.70. Or the WRTnode for just $25. Need even more power? The Raspberry Pi 2 is just $44.39 today on Amazon, and the intended price is lower. Or maybe the Beagle Bone Black for just $50 or so. There are LOTS of choices.
The fact is that while Arduino LLC and Arduino SRL argue it out, we can already build what they make, and China can already do it cheaper. Whoever wins, they better have a plan for how to woo us back, because it’s not 2006 anymore, and we’ll end up picking what we like, not what they decide to give us.
After all, to paraphrase the bard, “An Arduino by any other name is really just an ATMEGA328 with a boot loader.”